Estimate geodetic time series with dependent errors and missing observations
Source:vignettes/fit_model.Rmd
fit_model.RmdModel and estimator
The gmwmx2 R package allows to estimate
linear model with dependent errors described by composite stochastic
model in presence of missing data.
More precisely, we assume the following model:
where is a design matrix of observed predictors, is the regression parameter vector and is a zero-mean process following an unspecified joint distribution with positive-definite covariance function characterizing the second-order dependence structure of the process and parameterized by the vector .
We then define the a random variable which describes the missing observation mechanism. More specifically, the vector is a binary-valued stationary process independent of with expectation , , and covariance matrix whose structure is assumed known up to the parameter vector
We then assume that we only observe the stochastic process , where denotes the Hadamard product. Hence, represents the observed process vector with null elements in the positions where observations are missing.
Using to denote the Kronecker product, we then define as the design matrix with zero-valued vectors for the rows where observations are missing in (where represents a vector of ones of dimension ).
We estimate the parameters with the least square estimator:
We compute the estimated residuals as .
We then estimate with the Maximum Likelihood Estimator the parameters of the missingness process assuming that is generated from a Markov model with the following transition probabilities:
We then estimate the parameters using a Generalized method of Wavelet Moments approach (Guerrier et al. 2013).
More precisely, we rely on the result of Xu et al. (2017) that provide a computationally efficient form of the theoretical Allan variance (equivalent to the Haar wavelet variance up to a constant) for zero-mean stochastic processes such as to avoid computing these large matrices multiplication in the objective function. Indeed in Xu et al. (2017) they generalize the results in Zhang (2008) to zero-mean non-stationary processes by using averages of the diagonals and super-diagonals of the covariance matrix of . What this implies is that the GMWM, which uses this form, does not require the storage of the covariance matrix of , but only of a vector of dimension which is then plugged into an explicit formula consisting in a linear combination of the elements of this vector (these elements being averages of the diagonal and super-diagonals of the covariance matrix).
Estimating tectonic velocities and crustal uplift
While the GMWMX as described above and in more details in Voirol et al. (2024), is a general method for
estimating large linear model with complex dependence structure in
presence of missing data, the gmwmx2 R package
is currently developed specifically to estimate tectonic velocities from
position times series in graticule distance coordinates system (GD)
provided by the Nevada geodetic Laboratory (Blewitt 2024; Blewitt, Hammond, and Kreemer
2018).
Trajectory model
To estimate the trajectory model (see e.g., Bevis and Brown (2014) for more details), we construct the design matrix such that -th component of the vector can be described as follows with representing the ordered time point (epoch) indicated in Modified Julian Date and representing the reference epoch located exactly in the middle of start and end point of the time series:
where is the initial position at the reference epoch , is the velocity parameter, and are the periodic motion parameters ( and represent the annual and semi-annual seasonal terms, respectively with and ). The offset terms models earthquakes, equipment changes or human intervention in which is the magnitude of the step at epochs , is the total number of offsets, is the Heaviside step function defined as and the last term allow to model post-seismic deformation (see e.g., Sobrero et al. (2020)) where is the number of post seismic relaxation time specified, is the time when the relaxation starts in Modified Julian Date (MJD), is the relaxation period in days for the post-seismic relaxation and is the amplitude of the transient. Note that by default the estimates of the functional parameters are provided in unit/day.
When loading data from a specific station using the function
gmwmx2::download_station_ngl(), we extract from the Nevada
Geodetic Laboratory the position time series in GD coordinates, the time
steps associated with a equipment or software change and the time steps
associated with an earthquake near the station. All these objects are
stored in a object of class gnss_ts_ngl.
When applying the function gmwmx2::gmwmx2() to an object
of class gnss_ts_ngl, we construct the design matrix
by considering an offset term for all equipment or software changes
steps and all earthquakes indicated by the NGL. We also specify a
post-seismic relaxation term for all earthquakes indicated by the NGL.
If no relaxation time is specified in the argument
vec_earthquakes_relaxation_time, we consider a default
relaxation time of
days.
Stochastic model
It is generally recognized that noise in GNSS time series is best described by a combination of colored noise plus white noise (He et al. 2017; Langbein 2008; Williams et al. 2004; Bos et al. 2013) where the white noise generally model noise at high frequencies and the colored noise model the lower frequencies of the spectrum.
Example of estimation
Let us showcase how to estimate the tectonic velocity in for one specific component (North, East or Vertical) of one station.
Let us first load the gmwmx2 package.
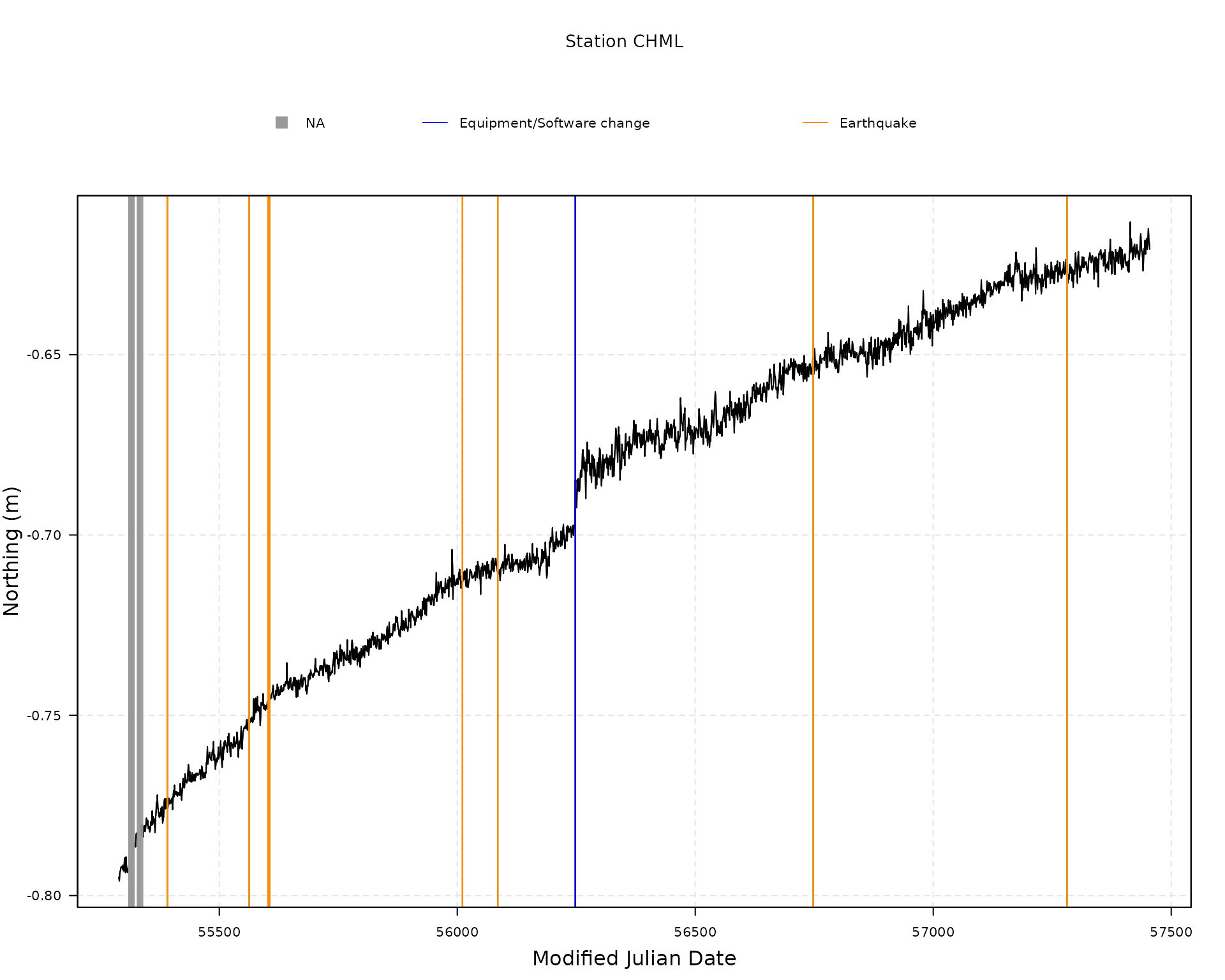
Download a station from Nevada Geodetic Laboratory
station_data <- download_station_ngl("CHML")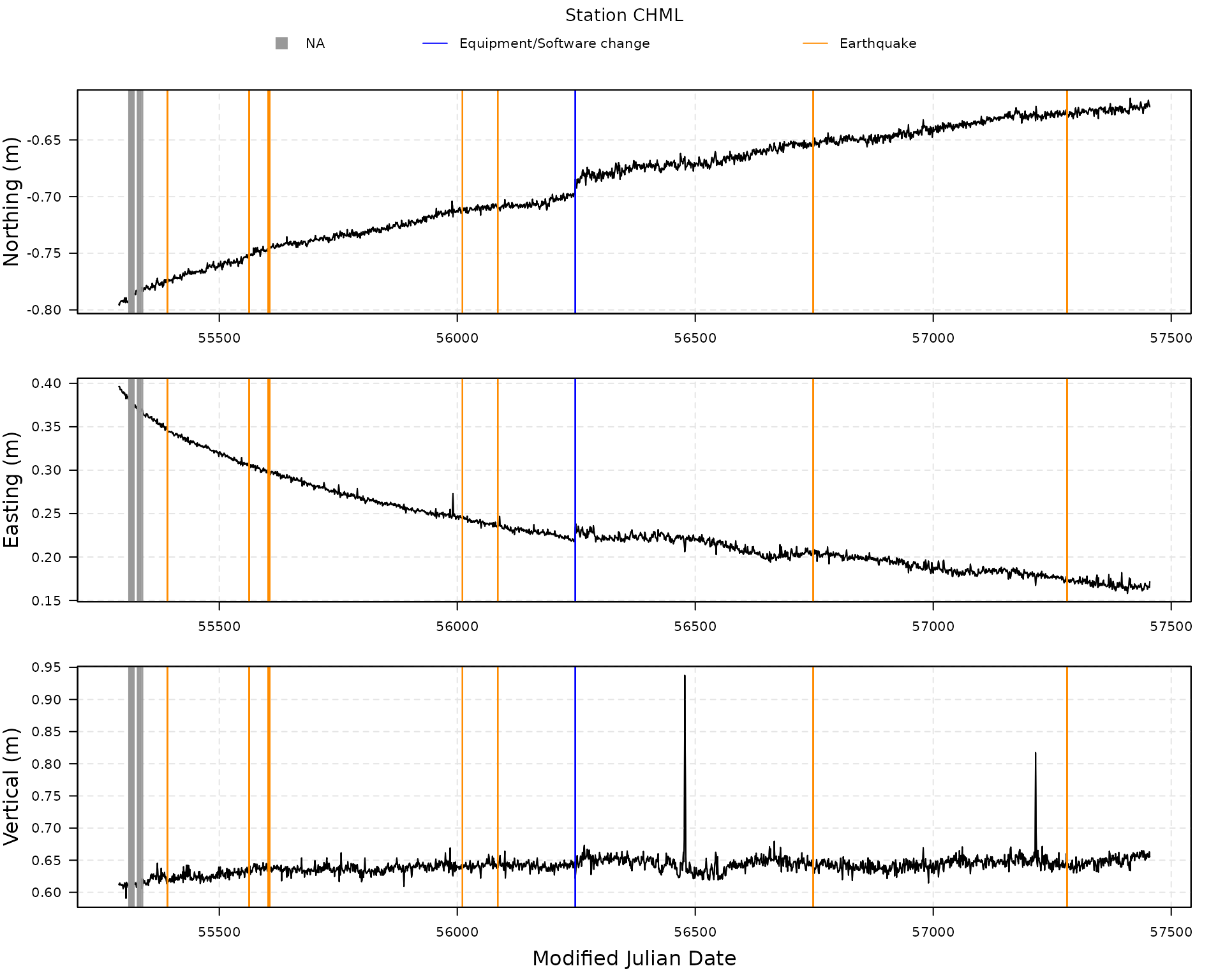
Estimate model on station data
fit1 <- gmwmx2_new(station_data, n_seasonal = 2, component = "N", model = wn()+ pl())
fit1## GMWMX fit GNSS Times Series (Nevada Geodetic Laboratory)
## Estimate Std.Error CI.Lower CI.Upper
## Intercept -7.091e-01 7.923e-03 -7.246e-01 -6.936e-01
## Trend 7.383e-05 7.537e-06 5.906e-05 8.860e-05
## Sin (Annual) -6.634e-04 3.101e-04 -1.271e-03 -5.567e-05
## Cos (Annual) 7.706e-04 3.285e-04 1.268e-04 1.414e-03
## Sin (Semi-Annual) 7.358e-04 2.186e-04 3.073e-04 1.164e-03
## Cos (Semi-Annual) -3.093e-04 2.254e-04 -7.511e-04 1.324e-04
## Jump: MJD 56248 1.698e-02 1.428e-03 1.418e-02 1.978e-02
## Jump: MJD 55391 7.543e-03 1.403e-03 4.794e-03 1.029e-02
## Jump: MJD 55563 1.638e-03 1.618e-03 -1.533e-03 4.810e-03
## Jump: MJD 55603 2.768e-03 2.214e-03 -1.570e-03 7.107e-03
## Jump: MJD 55606 7.748e-04 3.261e-03 -5.616e-03 7.166e-03
## Jump: MJD 56011 -1.185e-03 1.521e-03 -4.166e-03 1.796e-03
## Jump: MJD 56085 1.270e-03 1.561e-03 -1.789e-03 4.330e-03
## Jump: MJD 56748 -6.812e-04 1.257e-03 -3.144e-03 1.782e-03
## Jump: MJD 57281 -3.590e-04 1.404e-03 -3.110e-03 2.393e-03
## Earthquake: MJD 55391 1.819e-02 6.744e-03 4.976e-03 3.141e-02
## Earthquake: MJD 55563 9.271e-04 2.384e-02 -4.579e-02 4.765e-02
## Earthquake: MJD 55603 -3.728e-01 4.934e-01 -1.340e+00 5.942e-01
## Earthquake: MJD 55606 3.633e-01 4.879e-01 -5.929e-01 1.319e+00
## Earthquake: MJD 56011 4.511e-03 1.220e-02 -1.939e-02 2.841e-02
## Earthquake: MJD 56085 -1.898e-02 1.142e-02 -4.136e-02 3.411e-03
## Earthquake: MJD 56748 -9.572e-03 4.886e-03 -1.915e-02 4.758e-06
## Earthquake: MJD 57281 -2.302e-02 5.868e-03 -3.452e-02 -1.152e-02
##
## Missingness model
## Proportion missing : 0.0088
## p1 : 0.0028
## p2 : 0.3158
## p* : 0.9912
##
## Stochastic model
## Sum of 2 processes
## [1] White Noise
## Estimated parameters : sigma2 = 2.987e-07
## [2] Stationary PowerLaw
## Estimated parameters : kappa = -0.7261, sigma2 = 3.75e-06
##
## Runtime (seconds)
## Total : 0.8990Plot estimated model
plot(fit1)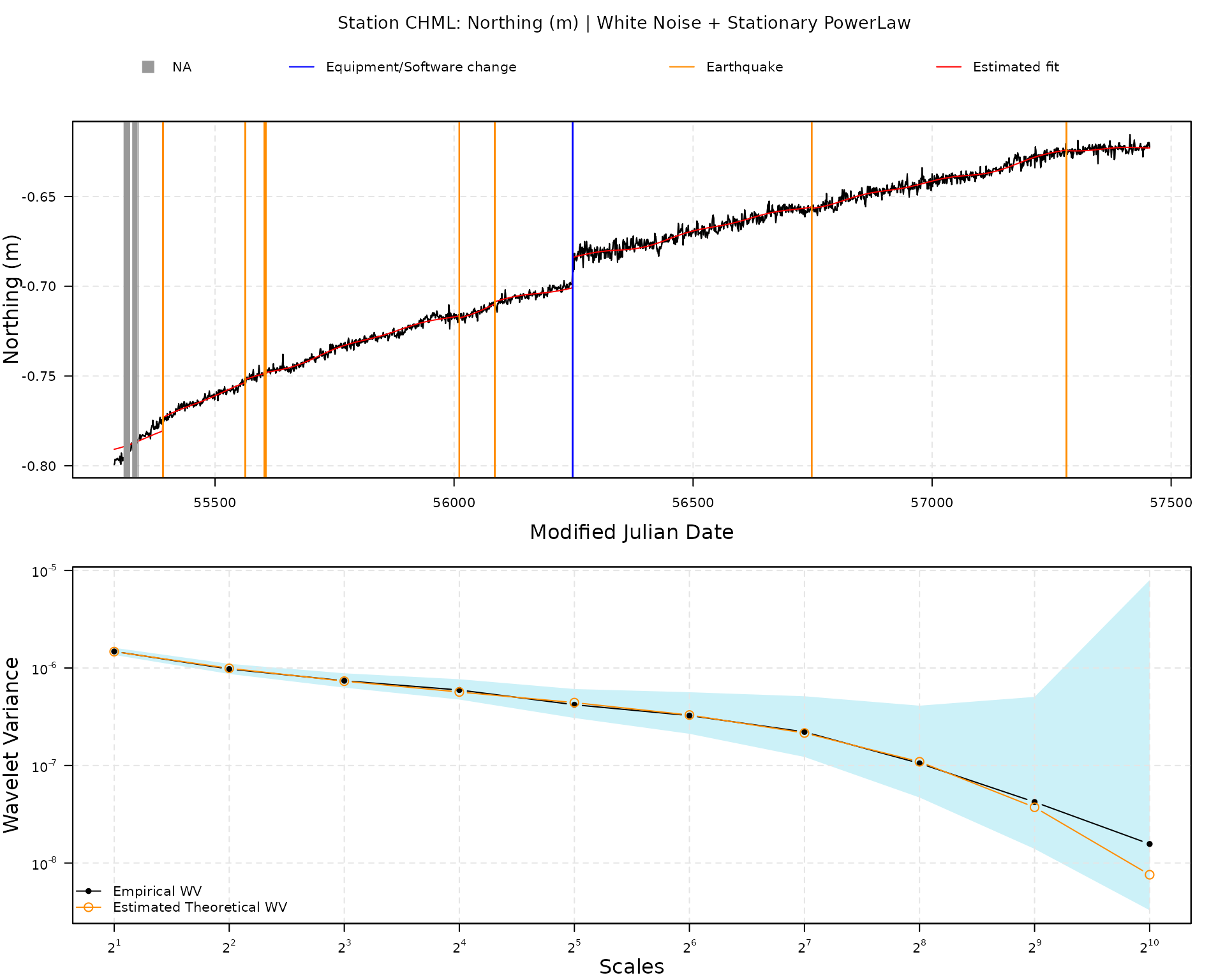
fit2 <- gmwmx2_new(station_data, n_seasonal = 2, component = "N", model = wn()+ flicker())
fit2## GMWMX fit GNSS Times Series (Nevada Geodetic Laboratory)
## Estimate Std.Error CI.Lower CI.Upper
## Intercept -7.091e-01 1.067e-02 -7.300e-01 -6.882e-01
## Trend 7.383e-05 1.016e-05 5.391e-05 9.375e-05
## Sin (Annual) -6.634e-04 4.072e-04 -1.462e-03 1.348e-04
## Cos (Annual) 7.706e-04 4.279e-04 -6.808e-05 1.609e-03
## Sin (Semi-Annual) 7.358e-04 2.609e-04 2.245e-04 1.247e-03
## Cos (Semi-Annual) -3.093e-04 2.706e-04 -8.397e-04 2.211e-04
## Jump: MJD 56248 1.698e-02 1.800e-03 1.345e-02 2.050e-02
## Jump: MJD 55391 7.543e-03 1.716e-03 4.180e-03 1.091e-02
## Jump: MJD 55563 1.638e-03 1.781e-03 -1.854e-03 5.130e-03
## Jump: MJD 55603 2.768e-03 2.192e-03 -1.529e-03 7.065e-03
## Jump: MJD 55606 7.748e-04 3.328e-03 -5.747e-03 7.297e-03
## Jump: MJD 56011 -1.185e-03 1.806e-03 -4.726e-03 2.355e-03
## Jump: MJD 56085 1.270e-03 1.875e-03 -2.404e-03 4.945e-03
## Jump: MJD 56748 -6.812e-04 1.763e-03 -4.136e-03 2.774e-03
## Jump: MJD 57281 -3.590e-04 1.763e-03 -3.814e-03 3.096e-03
## Earthquake: MJD 55391 1.819e-02 8.731e-03 1.082e-03 3.531e-02
## Earthquake: MJD 55563 9.271e-04 2.591e-02 -4.986e-02 5.171e-02
## Earthquake: MJD 55603 -3.728e-01 4.887e-01 -1.331e+00 5.850e-01
## Earthquake: MJD 55606 3.633e-01 4.833e-01 -5.839e-01 1.310e+00
## Earthquake: MJD 56011 4.511e-03 1.414e-02 -2.321e-02 3.223e-02
## Earthquake: MJD 56085 -1.898e-02 1.364e-02 -4.570e-02 7.752e-03
## Earthquake: MJD 56748 -9.572e-03 6.809e-03 -2.292e-02 3.774e-03
## Earthquake: MJD 57281 -2.302e-02 7.612e-03 -3.794e-02 -8.102e-03
##
## Missingness model
## Proportion missing : 0.0088
## p1 : 0.0028
## p2 : 0.3158
## p* : 0.9912
##
## Stochastic model
## Sum of 2 processes
## [1] White Noise
## Estimated parameters : sigma2 = 1.736e-06
## [2] Flicker
## Estimated parameters : sigma2 = 2.062e-06
##
## Runtime (seconds)
## Total : 0.5066
plot(fit2)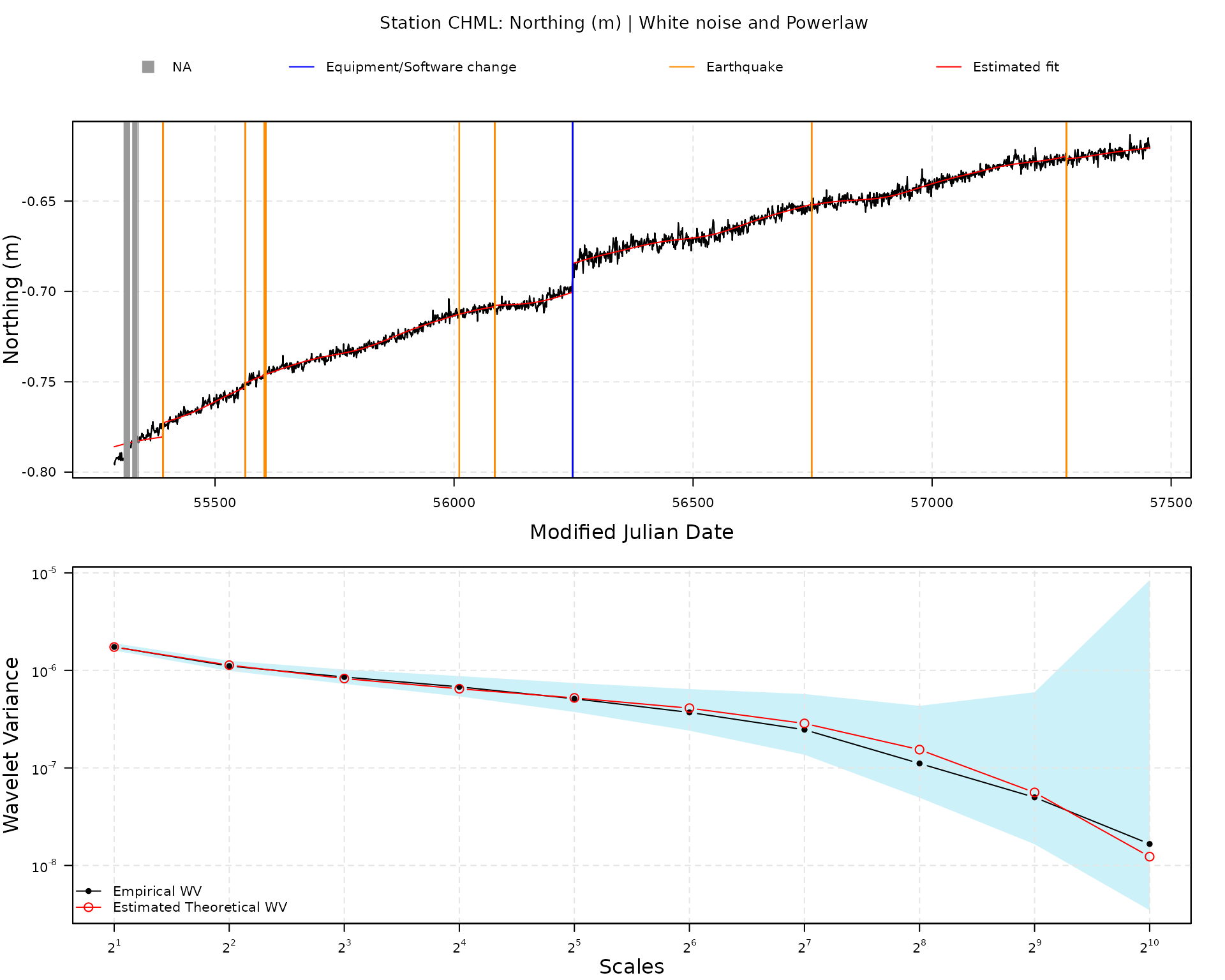
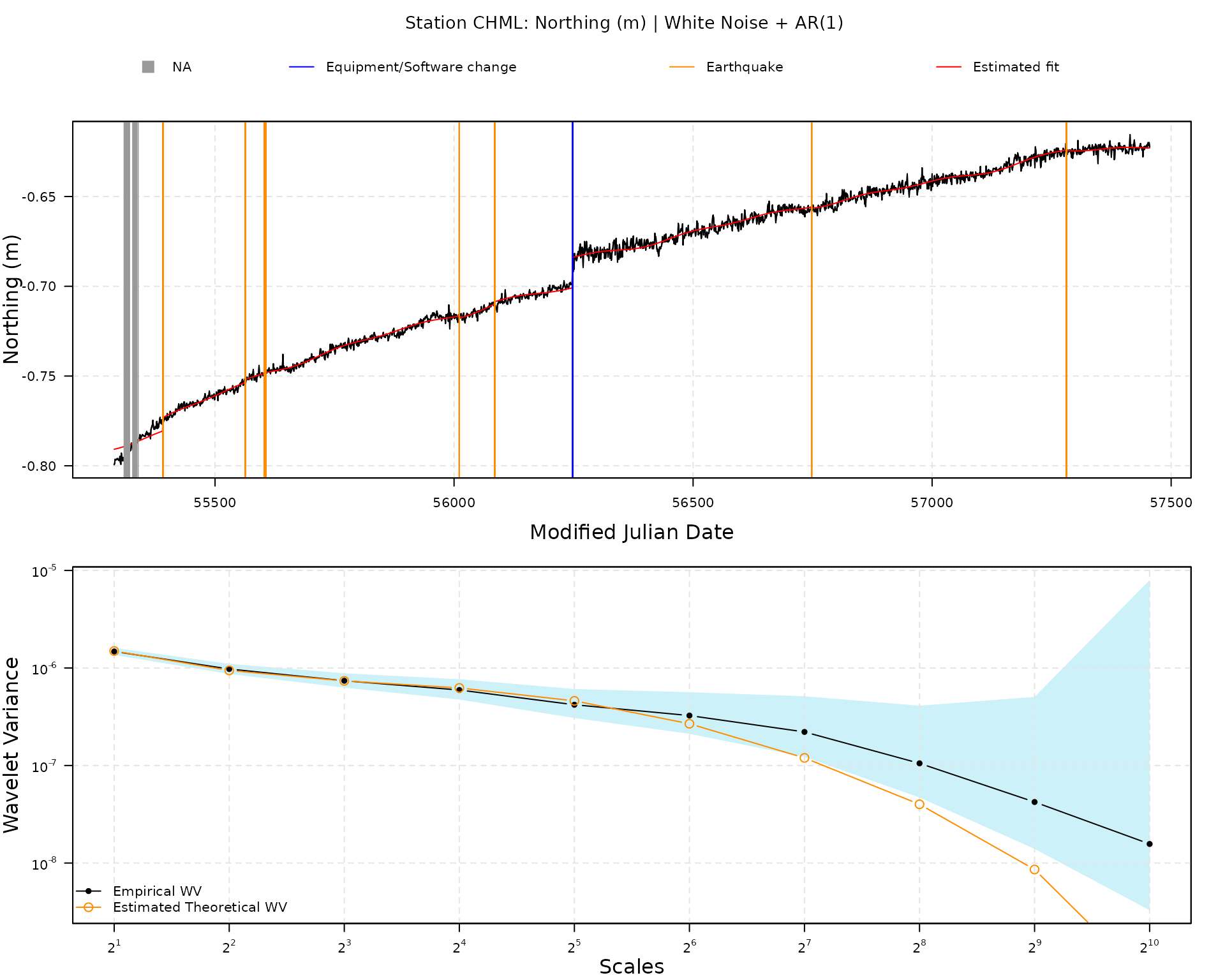
fit3 = gmwmx2_new(station_data, n_seasonal = 2, component = "N", model = wn() + ar1())
fit3## GMWMX fit GNSS Times Series (Nevada Geodetic Laboratory)
## Estimate Std.Error CI.Lower CI.Upper
## Intercept -7.091e-01 4.350e-03 -7.176e-01 -7.006e-01
## Trend 7.383e-05 4.156e-06 6.568e-05 8.198e-05
## Sin (Annual) -6.634e-04 1.746e-04 -1.006e-03 -3.211e-04
## Cos (Annual) 7.706e-04 1.892e-04 3.998e-04 1.141e-03
## Sin (Semi-Annual) 7.358e-04 1.575e-04 4.272e-04 1.044e-03
## Cos (Semi-Annual) -3.093e-04 1.604e-04 -6.236e-04 4.957e-06
## Jump: MJD 56248 1.698e-02 9.445e-04 1.513e-02 1.883e-02
## Jump: MJD 55391 7.543e-03 9.571e-04 5.667e-03 9.419e-03
## Jump: MJD 55563 1.638e-03 1.461e-03 -1.226e-03 4.502e-03
## Jump: MJD 55603 2.768e-03 2.220e-03 -1.583e-03 7.119e-03
## Jump: MJD 55606 7.748e-04 3.132e-03 -5.364e-03 6.913e-03
## Jump: MJD 56011 -1.185e-03 1.172e-03 -3.482e-03 1.112e-03
## Jump: MJD 56085 1.270e-03 1.193e-03 -1.068e-03 3.609e-03
## Jump: MJD 56748 -6.812e-04 6.133e-04 -1.883e-03 5.209e-04
## Jump: MJD 57281 -3.590e-04 9.322e-04 -2.186e-03 1.468e-03
## Earthquake: MJD 55391 1.819e-02 4.112e-03 1.014e-02 2.625e-02
## Earthquake: MJD 55563 9.271e-04 2.214e-02 -4.246e-02 4.432e-02
## Earthquake: MJD 55603 -3.728e-01 4.842e-01 -1.322e+00 5.762e-01
## Earthquake: MJD 55606 3.633e-01 4.786e-01 -5.748e-01 1.301e+00
## Earthquake: MJD 56011 4.511e-03 9.924e-03 -1.494e-02 2.396e-02
## Earthquake: MJD 56085 -1.898e-02 8.742e-03 -3.611e-02 -1.842e-03
## Earthquake: MJD 56748 -9.572e-03 2.435e-03 -1.435e-02 -4.799e-03
## Earthquake: MJD 57281 -2.302e-02 3.566e-03 -3.001e-02 -1.603e-02
##
## Missingness model
## Proportion missing : 0.0088
## p1 : 0.0028
## p2 : 0.3158
## p* : 0.9912
##
## Stochastic model
## Sum of 2 processes
## [1] White Noise
## Estimated parameters : sigma2 = 2.469e-06
## [2] AR(1)
## Estimated parameters : phi = 0.782, sigma2 = 9.644e-07
##
## Runtime (seconds)
## Total : 0.1925
plot(fit3)