Estimate the parameters of time series models based on the Allan Variance Linear Regression (AVLR) approach
avlr(x, ...) # S3 method for default avlr(x, qn = NULL, wn = NULL, rw = NULL, dr = NULL, ci = FALSE, B = 100, alpha = 0.05, ...) # S3 method for imu_avar avlr(x, qn_gyro = NULL, wn_gyro = NULL, rw_gyro = NULL, dr_gyro = NULL, qn_acc = NULL, wn_acc = NULL, rw_acc = NULL, dr_acc = NULL, B = 100, alpha = 0.05, ...)
Arguments
| x | A |
|---|---|
| ... | Further arguments passed to other methods. |
| qn | A |
| wn | A |
| rw | A |
| dr | A |
| ci | A |
| B | A |
| alpha | A |
| qn_gyro | A |
| wn_gyro | A |
| rw_gyro | A |
| dr_gyro | A |
| qn_acc | A |
| wn_acc | A |
| rw_acc | A |
| dr_acc | A |
Value
If the input x is a vec, then the function returns a list that contains:
"estimates": The estimated value of the parameters.
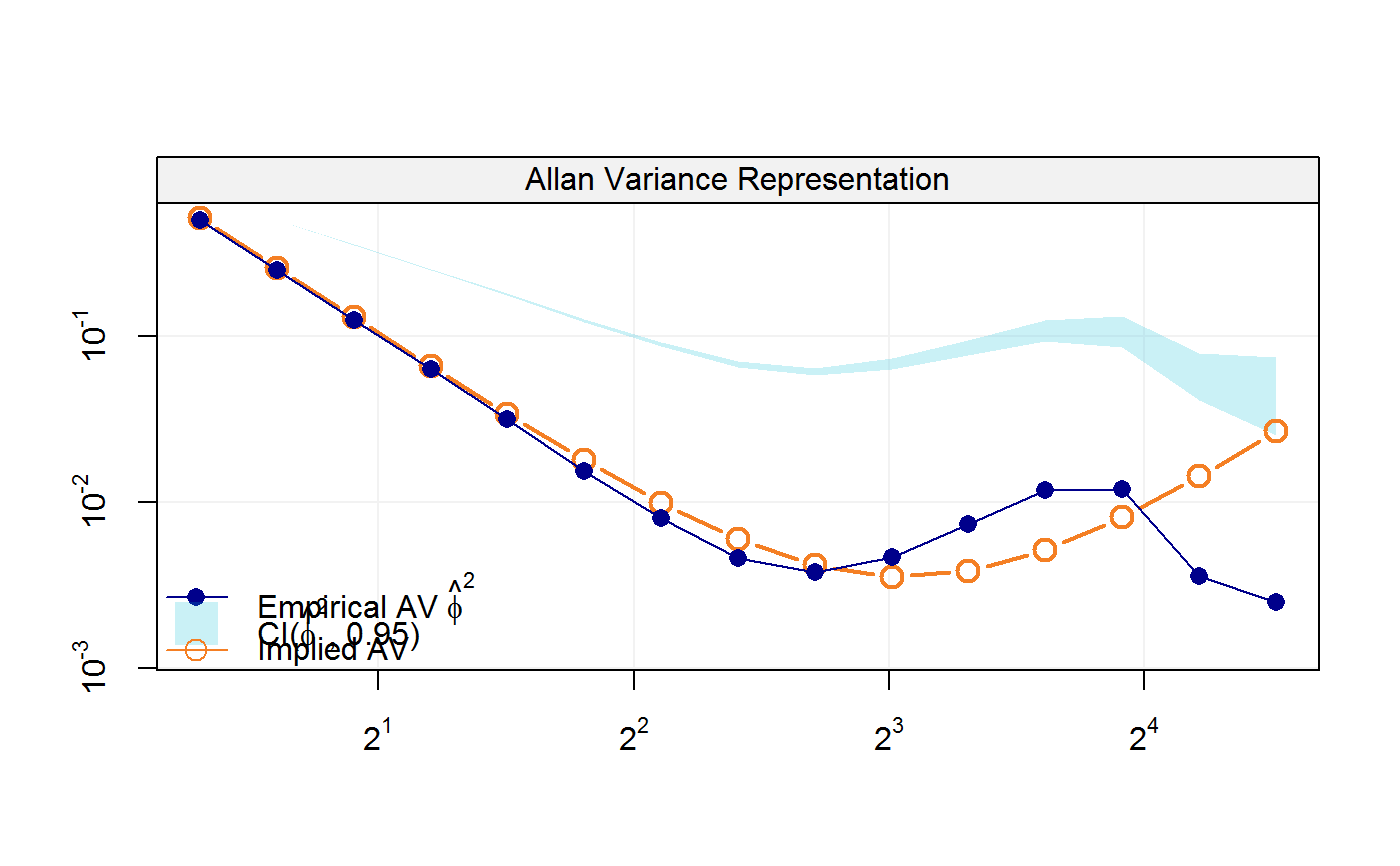
"implied_ad": The Allan deviation implied by the estimated parameters.
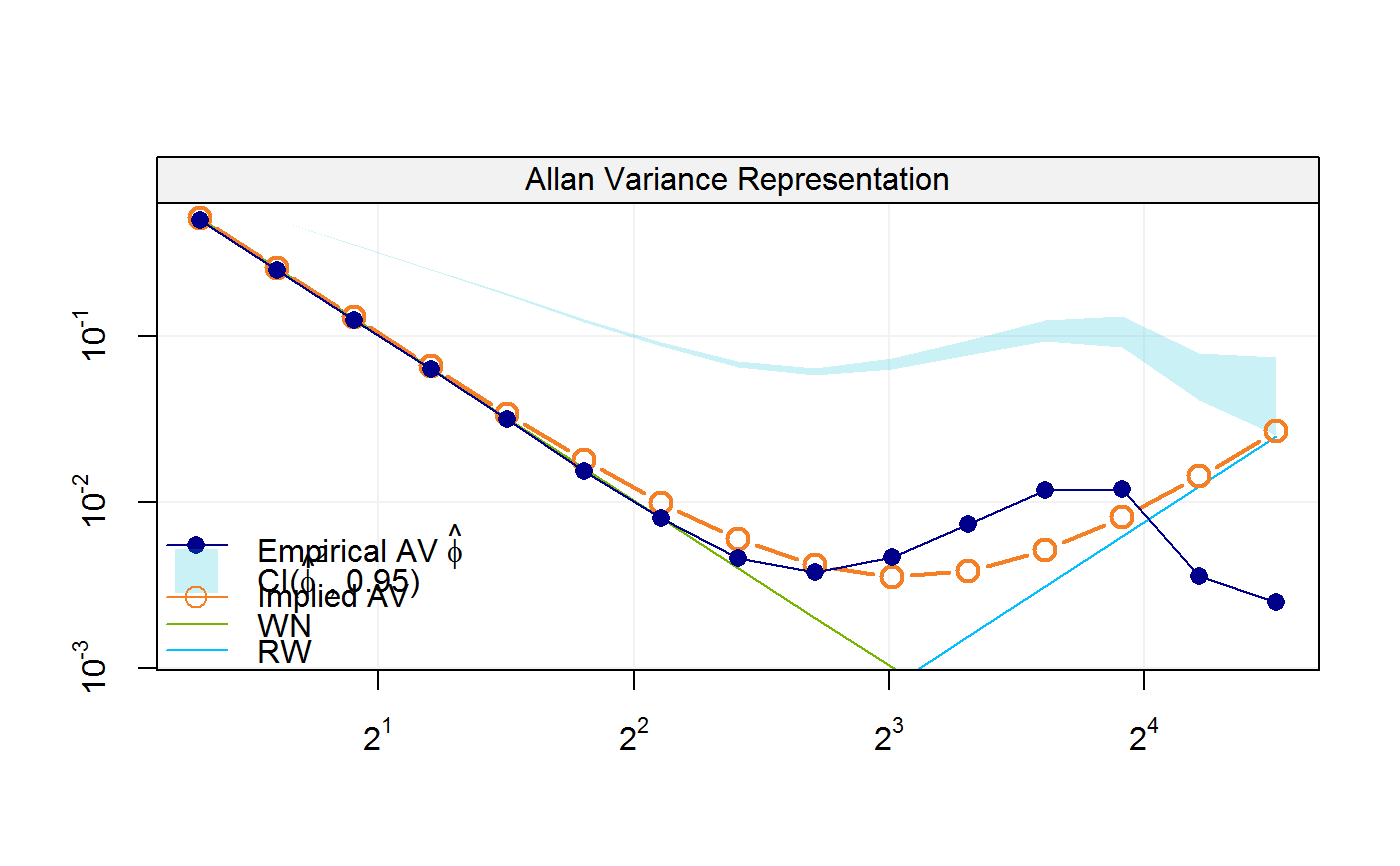
"implied_ad_decomp": The Allan deviation implied by the estimated parameters for each individual model (if more than one is specified).
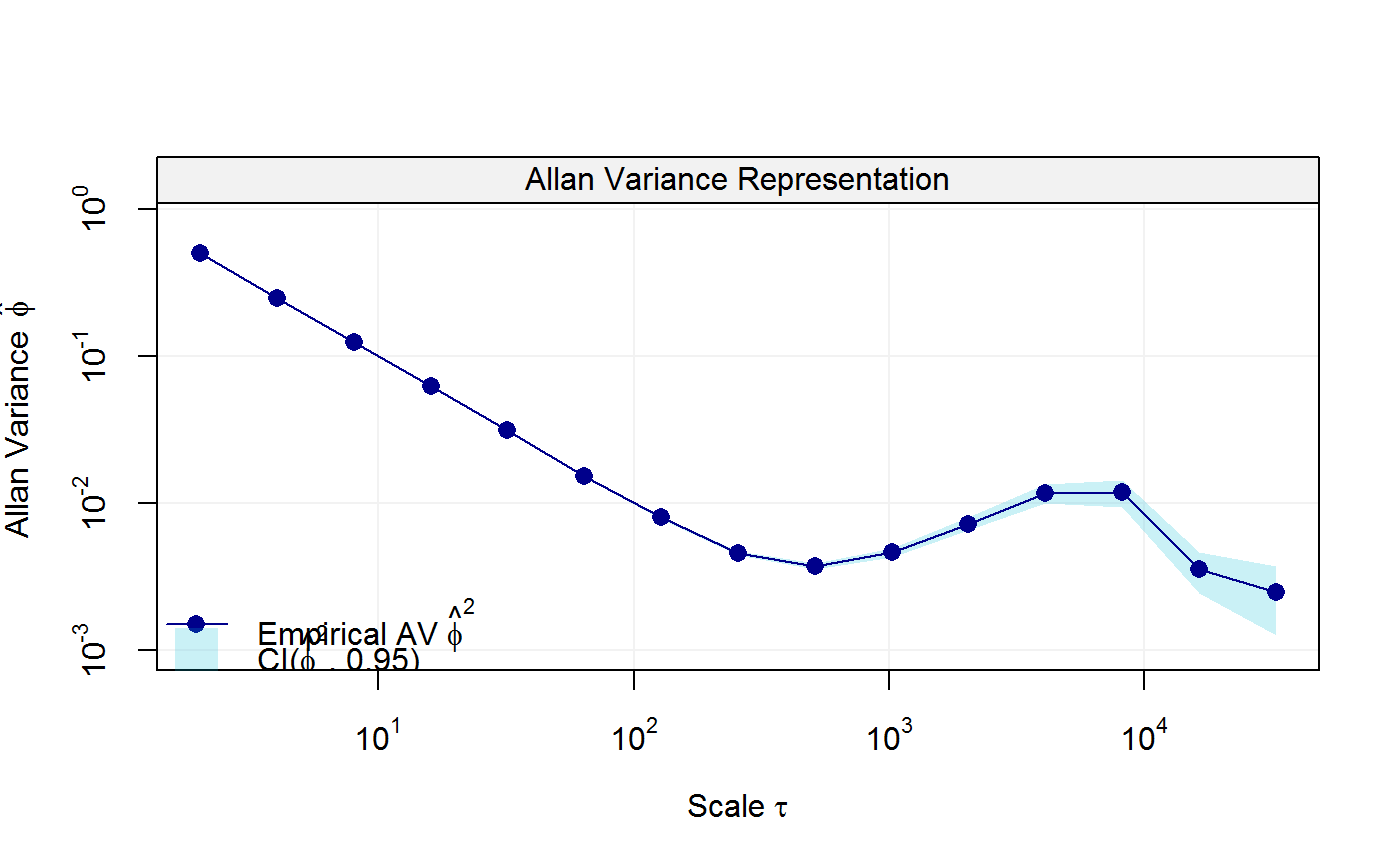
"av": The
avarobject computed from the provided data.
If the input x is of the class imu_avar, then the function returns a list that contains:
"gyro": The estimation results correseponding to the gyroscope component.
"acc": The estimation results correseponding to the accelerometer component.
"imu_av": The
imu_avarobject computed based on the IMU data.
Examples
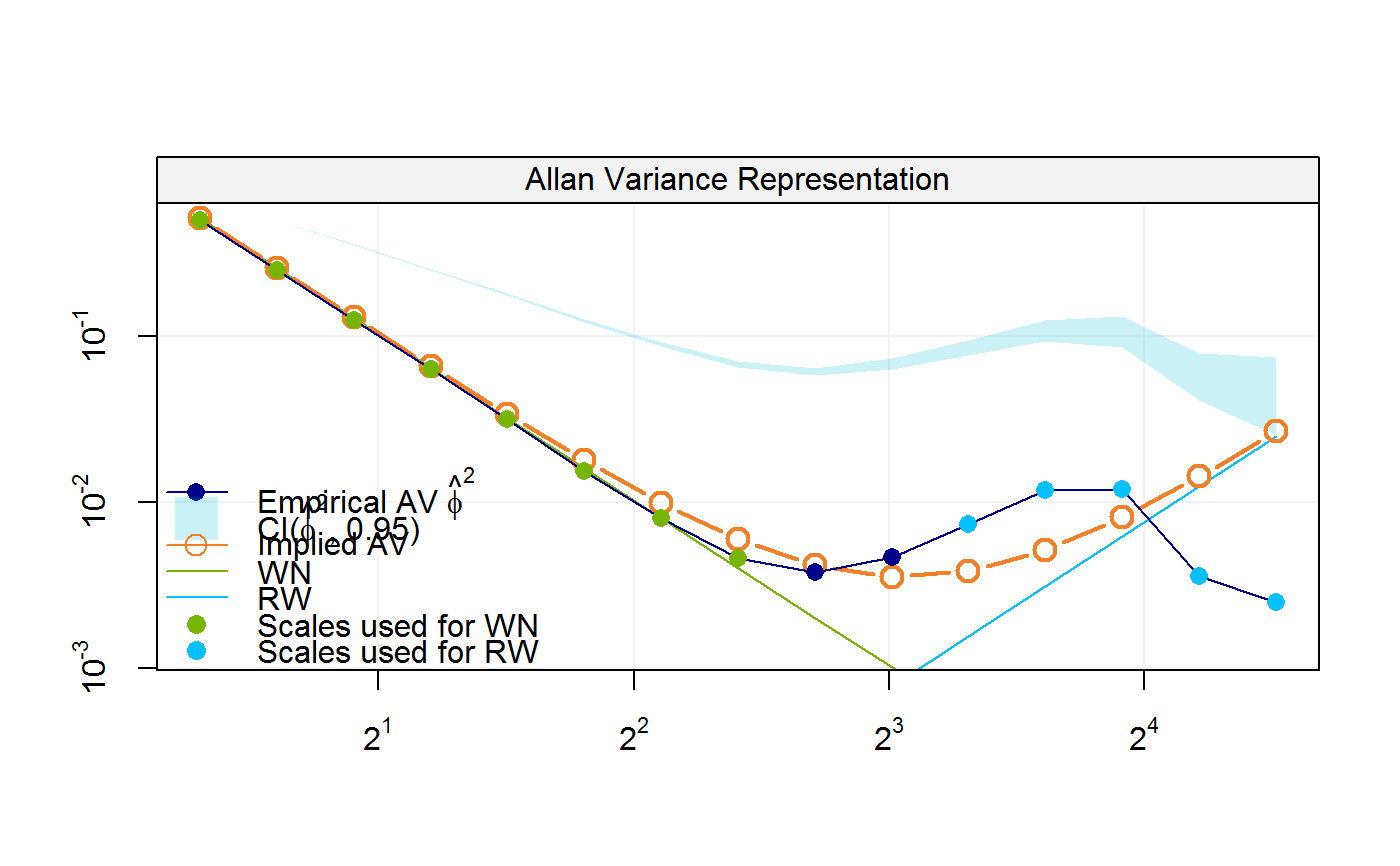
# Input time series fit = avlr(Xt, wn = 1:8, rw = 11:15) fit#> #> Estimates: #> Value #> WN 1.013398300 #> RW 0.001508291# Input directly Allan variance fit = avlr(av, wn = 1:8, rw = 11:15) fit#> #> Estimates: #> Value #> WN 1.013398300 #> RW 0.001508291